2015.04.26 SUN リバーフィールドの「力覚を感じ取れる」手術支援ロボットシステム
| text by : | 編集部 |
|---|---|
| photo : | shutterstock.com |

(※)この記事は2013年9月13日にastamuse「技術コラム」に掲載された内容を再構成したものです。
消化器外科や泌尿器外科において、手術時の患者の痛みを和らげたり、術後の傷跡を目立たなくするために、腹部を大きく切り開くのではなく、術部に小さな穴を開けて、腹腔鏡(内視鏡)と鉗子(かんし)などの手術用マニプレータを体内に挿入して行う低侵襲性の腹腔鏡手術(内視鏡下手術)が広く行われている。 しかし、狭い腹腔の中で鉗子類を動かすために 、鉗子先端の自由度が制限され、操作には高度な技術を必要とする。そこで、術者の負担を軽減し、正確な手術を実現するために、 ロボット技術による多自由度鉗子システムが盛んに研究されてきた。
米国インテュイティヴ・サージカル社が開発したハイテク内視鏡下手術ロボット「ダ・ヴィンチ」(da Vinci Surgical System)は特に有名で、2000年7月に米国FDA(食品医薬品局)の承認を受けて以来、世界中で2000台以上の納品実績を持ち、高い評価を得ている。しかし1台3億円程度という高額な導入費用に加え、年間2500万円程度のメンテナンス費用が掛かることが導入障壁となっている。
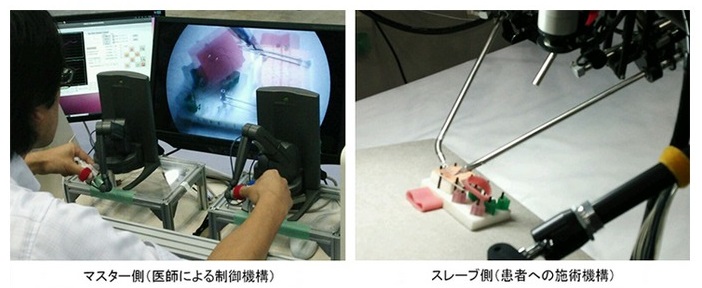
ダ・ヴィンチで採用されたマスタ・スレーブ方式では、術者が操作するマスタ(主操作装置)と患者側で動くスレーブ(従操作装置)とからなり、術者は3D画像を見ながら、VR技術を駆使して、遠隔操作によって内視鏡や鉗子を動かしていく。 より正確で安全な作業のためには、鉗子が受ける力覚(対象物と接したときの手応え感覚)の術者への提示が望まれる。
東京工業大学准教授だった川嶋健嗣氏(現・東京医科歯科大学教授)らが開発した手術支援ロボットは駆動システムとして、既存の電動ではなくゴムチューブに空気が出入りすることで伸縮する空気圧アクチュエータ(ゴム人工筋肉)を用いることで、装置の小型軽量化と同時に、患者の体内で何かに接触した時の力を柔らかく吸収するような動作を可能にした。
さらに、鉗子先端にかかる力を、力センサを用いずに空気圧シリンダ内の空気圧から推定してマスタ側に送り、術者の手に疑似力覚としてフィードバックするという「手応えを感じ取れる」ロボット操縦システムとした。また、空気圧駆動系で構成されているため、今まで電気モータシステムでは作動しなかったMRI施設内のような磁場の影響が強い場所に設置して、MRI画像を見ながら手術を行うことも可能となる。
2014年5月20日、同技術を基盤として、医療機器開発・販売を行う大学発ベンチャー「リバーフィールド株式会社」が設立された。同年8月にはVCから約2億円を調達、10月には第三種医療機器製造販売業許可を取得し、日本・欧州での機器販売を予定している。
-
 News2015.11.13 FRI あなたの考えるプロダクトデザインの未来は?~I・Oさん(30代・メーカー勤務)の場合~I・Oさん(30代・メーカー勤務)が注目する千葉大発ベンチャーとは?
News2015.11.13 FRI あなたの考えるプロダクトデザインの未来は?~I・Oさん(30代・メーカー勤務)の場合~I・Oさん(30代・メーカー勤務)が注目する千葉大発ベンチャーとは? -
 Column2015.04.23 THU 軟骨を診ることを可能にした「タルボ・ロー干渉画像撮影」技術軟骨は骨と骨の間のクッションの役割を果たしているが、激しい運動や加齢によって徐々に摩耗していく。
Column2015.04.23 THU 軟骨を診ることを可能にした「タルボ・ロー干渉画像撮影」技術軟骨は骨と骨の間のクッションの役割を果たしているが、激しい運動や加齢によって徐々に摩耗していく。 -
 Report2015.12.10 THU VR・スポーツ映像解析・医用ハプティクスなど多様なテーマで展開~「KEIO TECHNO-…12月4日、東京国際フォーラムで開催された「KEIO TECHNO-MALL 2015」。慶應義塾大…
Report2015.12.10 THU VR・スポーツ映像解析・医用ハプティクスなど多様なテーマで展開~「KEIO TECHNO-…12月4日、東京国際フォーラムで開催された「KEIO TECHNO-MALL 2015」。慶應義塾大… -
 News2015.08.20 THU 「燃料電池」市場で特許出願件数の多い大学・研究機関トップ51位は産総研。山梨大学、JAEAもランクイン。
News2015.08.20 THU 「燃料電池」市場で特許出願件数の多い大学・研究機関トップ51位は産総研。山梨大学、JAEAもランクイン。


